Underwater Robotic Observation Vehicle (ROV)
- Gabriela Araujo

- Apr 7, 2021
- 2 min read
The project was to design an underwater exploration vehicle with the capability of capturing images and video via remote directional control in two axes being defined as depth and horizontal movement. This vehicle is ideal for underwater surveillance for times when a diver is not appropriate.














Assumptions and limitations:
The major limitation of the craft is the water proofing. The craft is designed to meet the pressure experienced in shallow waters, but with better seals the strength of the craft could survive to much greater depths.
Design Specifications:
The ROV is designed for a 4-meter depth. Movement of the ROV is to be controlled remotely through a wired connection. Video will be recorded through a camera mounted to the ROV.
Flow Chart and Block Diagrams





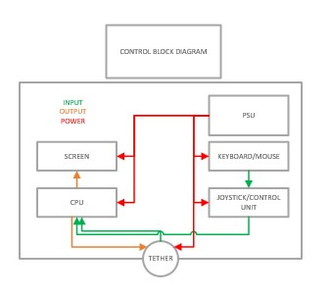
Figure 1 - Flow Chart of Design Process.
Figure 2 - ROV Submersible block diagram.
Figure 3 - Control Unit block diagram.
Circuit Board and Data:
Custom PCB
Arduino Nano
Two A4988 Stepper Drivers
MAX485 Module
4 Servos or ESCs
8 Analog data in/out
4 Digital In/out
5V and 12V power












Controls:


Portable Pelican case
Realtime video feedback
Control of robotic vehicle via a wired tether
Raspberry Pi mounted behind screen
Future capability of LED light control and battery monitoring
Technical Details:
Motors
RPM/V: 1100kv / Max Current: 22.5A / Voltage: 7.4 ~ 14.8v
Battery
Voltage: 14.8V Amp / Hour Rating: 18Ah / Maximum Current Draw 80A / Cell Configuration 4S6P
ESC
Current: 30A / Voltage 7.4 ~ 14.8v
Tether Wire
Wire Size (AWG): / Voltage Drop = A*L*(ohms/ft)
Camera
Power Supply: 3.3v ~ 5v / Current Draw: 500mA
Stepper Motor
Voltage: 5v / Voltage: 12v / Current Draw: 200mA
Final Product/Project Results:
The product was a major success. The ROV was able to operate remotely with the ability to move in any direction and also able to transmit a real time video stream back to the driver. The team met the goals we set out to accomplish and are proud of the results of our work. We see a lot of potential in an update of the design to be an extremely useful tool for underwater surveillance.


Comments